| Cloud Programming World Cup 2018 수상 결과 발표 |
Cloud
Programming World Cup 제 6회 학생 클라우드 프로그래밍 월드컵(주최: CPWC 실행위원회)의 엔트리 총수는
17개 팀으로, 6개 팀이 노미네이트. 2018년 11월 15일 시나가와 인터시티 홀에서 최종 공개 심사를 거쳐 월드컵상 및
4개 심사위원 특별상을 결정하였습니다.
 |
|
월드컵상 |
엔트리No.
32 |
| 작품 타이틀 : Autonomous Truck Loader using OpenCV |
| 팀명 : Tech.Divas 소속 : 턱시라 공과 기술 대학 참가국: 파키스탄 |
|
 데이타 개요 데이타 개요
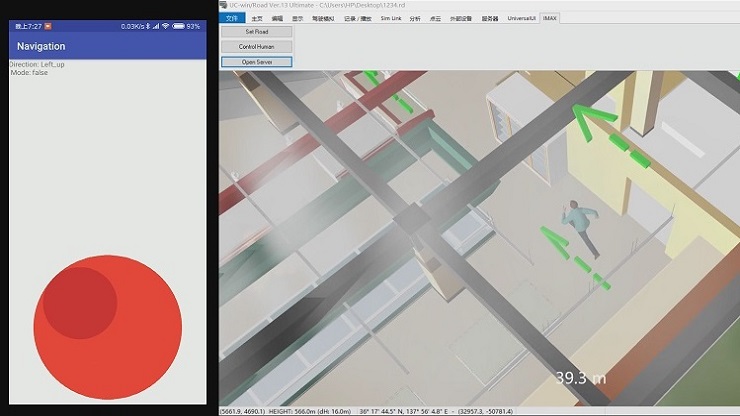
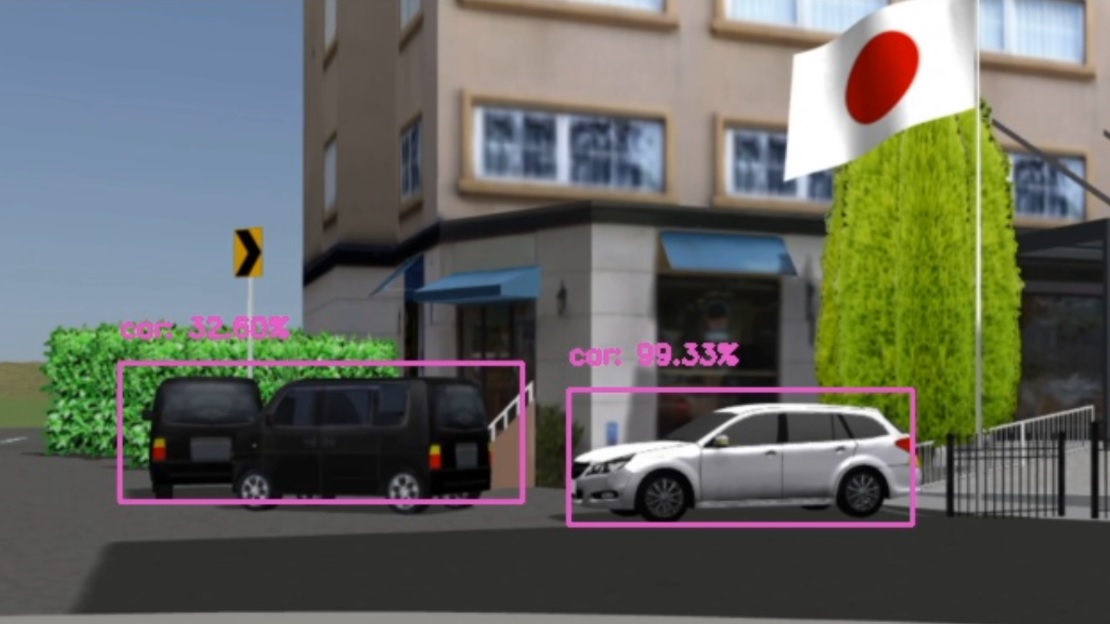
이 작품은 2개의 모듈로 구성되어 있다.
1. python을 사용하여 개발한 독립 어플리케이션으로, UDP 프로토콜에서 UC-win/Road와 통신하는 컴퓨터 비전 모듈
2. UDP 서버로서 기능해, 상기 모듈로부터 받은 커맨드에 따라 시뮬레이션을 갱신하는 Delphi로 개발한 플러그 인.
컴
퓨터 비전 모듈은 SDK 플러그 인을 사용해 UDP상에서 트럭 로더와 통합되고 있다.트럭에는 물체·차선의 검출용으로 프런트
카메라가 장착되어 카메라는 사용전에 OpenCV 라이브러리를 이용해 캐리브레이션 된다.시스템이 물체를 검출하고 쓰레기와 눈을 들
때 마다 메시지가 표시되며 이 시스템은 보행자나 타차를 검출해 충돌회피에도 사용할 수 있다. |
|
The project Autonomous Truck Loader using OpenCV comprises of two modules.
- A computer vision module developed using python and running as independent
application. This module communicates with UC-win/Road through UDP protocol.
- A plugin developed in Delphi which acts as a UDP server and receives commands
from the python module and updates the simulation accordingly.
The computer vision module is integrated with loader truck on UDP using
SDK Plugin. A front camera is mounted on simulated truck for object/ lane
detection. The truck mounted camera is calibrated before use, using OpenCV
libraries for visual display and Road Lane.The system displays a message
whenever it detects an object, reaches out, and collects garbage/lifts
snow. Additionally, the system is also capable of detecting pedestrians
and other vehicles to avoid any type of collision. |
작품감상
|
|
Page Top  |
| ■CPWC심사위원장 후쿠다 도모히로 씨의 강평 우리 나라에서는 2020년도부터 초등학교에서 프로그래밍 교육의 전면 실시를 향해서 준비가 진행되고 있다.
CPWC 2018(학생클라우드 프로그래밍 월드컵)은 포럼에이트사의 UC-Win/Road, VR-Cloud의 개발 키트를 기반으로 개발한 엔지니어링 소프트, 비즈니스 소프트, 게임 소프트웨어를 응모해 주시는 콘테스트.
6
년째를 맞이한 금년은 17편이 엔트리 되어 뉴질랜드에서 예선 전형회를 실시했다. 이 단계에서는 10월의 노미네이트 작품 제출을
향해서 구체화해야 할 점, 보강해야 할 점을 각 팀에 피드백했다. 그리고 10월의 노미네이트 심사에는 자동운전이나 방재에 관한
6개의 작품이 제출되어 왔다.노미네이트 심사에서는 그랑프리나 특별상의 가능성이 있는 6작품 모두에 최종 프레젠테이션으로
진행함으로써 최종 프레젠테이션을 위해 개선해야 할 점을 피드백했다. 그리고 최종 프레젠테이션(11월 15일)에서는 각 팀 2분의
차분에서 개발한 시스템의 특징이나 도달점을 중심으로 비디오 프레젠테이션을 실시하고, 최종 심사를 실시했다. 그랑프리에 빛난
Tech. Divas(택시라 공대·파키스탄)의 "Autonomous Truck Loader using OpenCV"는, 노상의
쓰레기 수집이나 제설과 같은 작업을 자동으로 실시하기 위한 시스템이며, 자동 인식 기술에 착안해 컴퓨터 비전과 VR시스템을
조합했다.작업 트럭을 대상으로 한 참신하고 도전적인 테마이다.
심사원 특별상으로서,
- 환
경설계 정보학상 "The automatic driving man-machine sharing control system":
ITSCer(우한이공대학·중국)의 작품은 자동운전 레벨 3의 오토 파일럿과 매뉴얼 운전과의 변환 제어를 다양한 상황에 따라
실장하고 있는 것. 기술력의 높음을 느낀 작품이다.
- 베스트 최적화상 "Fire Escape Simulation
System":IMAX(상하이대·중국)의 작품은 화재 발생시에 피난 대상자의 휴대 전화의 Bluetooth를 이용해 옥내에 있는
사람들의 움직임을 컨트롤 해, 안전한 피난 루트를 나타내려고 한 시스템이다.올해는 자동운전에 관한 작품이 다수인 가운데 자동운전
이외의 유일한 작품이었다.
- Design and Computation Award 'Modeling
Naturalistic Driver Behavior in Traffic using Deep Neural Network':
KAI(국민대학교·한국)의 작품은 심층학습을 응용해 자연스러운 운전 거동을 하는 드라이버 모델과 LIDARs, 카메라를 포함한
다양한 센서를 탑재한 실차를 개발, UCUCUR.완성도의 높이가 엿보였다.
- IT
이노베이션 상 "Passing the intersection n urban road without stopping":
Fireworking (베이징 건축대학·중국)의 작품은 차량의 속도, 거리, 전방의 신호주기를 추적하여 제한속도를 나타내는
시스템의 개발. 이로 인해 드라이버는 빨간불의 정차를 가능한 한 피할 수 있다. 운전 시뮬레이터의 고도화를 목표로 한
제안이었다.
올해 제출 작품은 전반적으로 완성도가 높아 미미한
차이를 꼼꼼히 읽으며 최종 심사를 거쳐야 했다.최종 프레젠테이션에 진행된 6개 팀에는 경의를 표하고 싶다.그리고 내년
2019년은, 더 많은 나라로부터의 작품 응모를 기대하고 싶다.
|
| Page Top |
 |
|
 |
|
 |
|
 |
후쿠다토모히로
CPWC 심사 위원장,
오사카 대학 대학원 공학
연구과 준교수 |
|
사토오세이지
도쿄 공업 대학 명예 교수 |
|
나라하라 다로 씨
뉴저지 공과대학
건축디자인학부 준교수 |
|
펜쿠레아슈-요안 씨
포럼 에이트
개발 시니어 매니저 |
|
개최일: 2018년 11월 15일(목) 회장:시나가와 인터시티 홀(MAP)
VR-Cloud ®에 의한 클라우드 상에서의 심사·투표 및 심사원에 의한 최종 심사회를 거쳐 선정된 수상작품의 표창식을 실시합니다.
수상 결과는, 후일 포럼 에이트 HP에서 발표 예정.
 |
|
건설 IT 저널리스트
이에이리루우타씨
BIM
이나 3차원 CAD, 정보화 시공 등의 도입에 의해 생산성 향상, 지구환경보전, 국제화라는 건설업이 안고 있는 경영 과제를
해결하기 위한 정보를 "한 걸음 앞의 시점"에서 계속 발신하는 건설 IT 저널리스트 "연중무휴·24시간 접수"를 모토로
건설·IT·경영에 관한 기사의 집필이나 강연, 컨설팅 등을 실시하고 있다. |
|
 |
|
텔레비전 리포터
아베 유지씨
1958
년, 도쿄도 출신. 와세다 대학 정치 경제 학부졸. 현재 "상쾌 정보 버라이어티키리!!"에서 레귤러 리포터를 맡는 등, 리포터로
활약중. 영어가 능통하여, 해외취재나 일본 방문한 할리우드 배우의 인터뷰시에는 통역을 거치지 않고 직접 영어로 회화를 하거나,
프로의 가정교사로서 수많은 유명학교에 학생을 합격시켰다는, 알려지지 않은 일면도 있는 인텔리파 |
|
심사 기준
작
품제작에서는 UC-win/Road, VR-Cloud의 전송시스템 a3s의 SDK(개발 키트)에서 개발을 실시한 S/W 또는
VR-Cloudick에서 동작하는 어플리케이션 프로그램. 엔지니어링 소프트, 비즈니스 소프트, 게임 소프트웨어를 대상으로 한다.
또한 제출물로서는 사용 소프트웨어 소스 일식 및 이들을 설명하기 위한 ppt로 한다.
이러한 성과에 의해 프로그래밍의 품질, 논리성·기술력, 심미성· 오리지널리티, 프레젠테이션 기술 등의 점에서 어떻게 SDK를 활용해 클라우드 소프트웨어를 만들었는지를 평가한다.
※응모 작품의 저작권등에 따라
- 본 컴페티션을 통해서 제작된 데이터, 작품 및 성과물의 저작권은 저작자 본인에게 있는 것으로 한다.
- 포
럼 에이트는 저작자가 제작한 데이터, 작품 및 성과물에 대해서 편집, 가공 등을 실시하고, 대외 발표, 연구 발표, 영업 활동,
홍보 활동으로서 HP, 메일 뉴스, 홍보지, 서적, 잡지, 신문 등 매체로의 게재·배포를 실시하는 등 2차 사용 허락 권리를
가지는 것으로 한다.
|
Page
Top  |
상금·부상
●월드컵상 1작품 (상금 30만)
●심사위원 특별상 각상 3~4작품정도 (상금 5만)
●노미네이트 작품 (기념품)
노미네이트 작품으로 선정된 팀에는 국내 3명, 해외 2명을 시상식에 초대! ※국내는 관동 이외를 대상으로 합니다. |
응모 자격, 기준
응모 작품의 제작에 있어서의 참가자가 모두 학생인 것(사회인 학생, 2017년도 졸업까지 작성된 졸업 연구, 제작 작품등도 대상) |
엔트리 작품 응모 흐름
- 엔트리 접수
엔트리 접수 기간중(2018년 4월 2일(월) 6월 21일(목))에 엔트리와 작품 개요를 보내 주세요.
블라인드(무기명) 심사에서 실시합니다.팀명·작품명은, 개인, 단체가 특정되지 않는 것에 한정합니다.
아래의 페이지로부터, 팀명, 팀 멤버등을 등록해 주세요.

아래와 같은 폼을 사용해, 작품의 개요 설명(영어 100 word)과 이미지 화상으로 표현해, 업 로드해 주세요.
 |
(Word、209KB) |
- 다운로드 페이지 등의 안내
엔트리 접수 완료 후 아래를 별도 메일로 안내하겠습니다.
・엔트리ID
・작품 제작용 제공 데이터 자료의 다운로드 URL
・참가 희망 세미나 신청의 안내
- 작품 응모
작품의 응모는, 후일 별도 안내하는 전용 URL로, 작품의 응모 접수 기간중(2018년 9월 28일(금) 10월 3일(수))에 행해 주십시오.
- 제출물
・동작하는 애플리케이션 프로그램
・소스코드·스크립트(텍스트형식)
・프로그램의 간단한 유저 메뉴얼(Word 형식등)
・프로그램의 컨셉, 향후의 과제나 아이디어등 (PowerPoint 형식등)
-프로그램뿐만 아니라 콘텐츠 합한 제출도 가능
・5분 까지의 프로그램 데먼스트레이션 동영상 파일 (MP4 형식)
|
사용가능소프트웨어/대여기간
엔트리를 실시한 참가자는, 대상 소프트웨어 라이선스의 기간내 무상 대여 및, 대상 제품에 대해 포럼 에이트가 주최하는 트레이닝, 세미나(유상 또는 무상)에도 참가할 수 있습니다.
제품에 대해서는, 엔트리 후에 송신되는 자동 답장 메일에서 신청해 주신 후, 별도 라이선스를 안내해 드리겠습니다.
사용가능 소프트웨어는 아래의 포럼 에이트 제품 및 개발키트입니다.
■UC-win/Road ■UC-win/Road
SDK ■VR-Cloud® ■VR-Cloud®
SDK
■독자전송기술 a3s(Anything
as a Service) SDK
|
2018년 4월 2일(월)~11월 22일(목)
※다만, 제품에 의해 기간 제한이나 동작 제한, 제공 스타일이 다른 경우도 있습니다.
※대여 하는 라이센스는 본컴페로의 사용에 한정합니다. |
|
Cloud
Programming World Cup
제5회 학생 클라우드 프로그래밍 월드컵

|
|
Cloud
Programming World Cup
제4회 학생 클라우드 프로그래밍 월드컵

|
|
Cloud
Programming World Cup
제3회 학생 클라우드 프로그래밍 월드컵

|
|
Cloud
Programming World Cup
제2회 학생 클라우드 프로그래밍 월드컵

|
|
Cloud
Programming World Cup
제1회 학생 클라우드 프로그래밍 월드컵

|
|
|
|
|