Cloud Programming World Cup 第7屆 學生雲端編程世界盃(主辦單位:CPWC執行委員會)的報名總數共有22支隊伍,其中有20支隊伍透過預選賽,最後7支隊伍獲得入圍獎提名。於2019年11月14日在品川InterCity Hall舉行最終公開審査,並選出世界盃獎及4件評審員特別獎。
 |
|
評審員特別獎
Best Optimization Award
佐藤 誠(東京工業大學 名譽教授) |
Entry
No.
26 |
| 作品名稱: Emergency Vehicle Plugin |
| 隊伍名稱: Brochet 所屬單位:北京建築大學(中國) |
|
|
 作品概要
作品概要
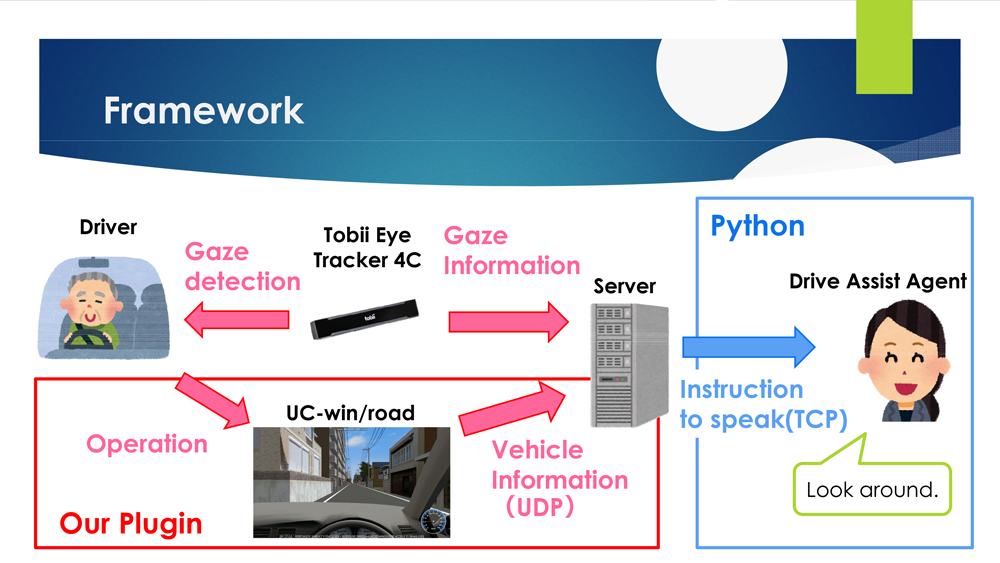
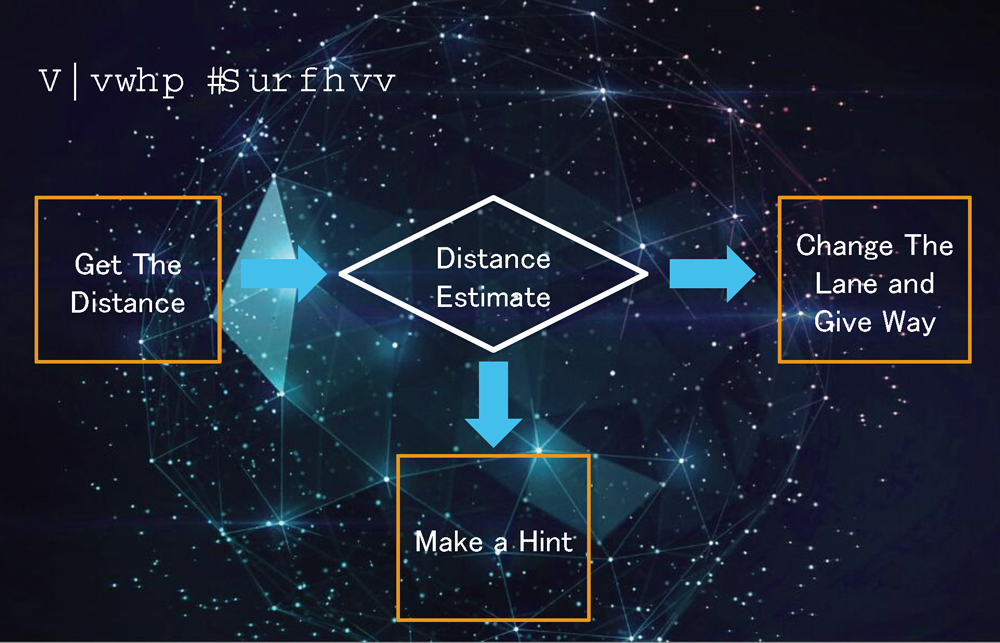
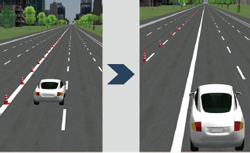
本作品是使用自動駕駛技術和物聯網功能來提高緊急車輛通行效率的作品。 EVP會提前提前向私家車發送回避命令消息,以便其他車輛的駕駛員可以讓路。 如果駕駛員沒有快速響應,也可以指示駕駛員自動改變車道。 這實現了該插件的主要目的,即盡快駕駛應急車輛。
In order to improve the traffic efficiency of emergency vehicles, with
the help of the technology of autopilot and Internet of Things function,
EVP can send avoidance command messages to other civilian cars front in
real time, and help other drivers make ways in time. Or even make other
vehicles automatically direct the lane-changing tasks if their drivers
fail to respond quickly. Thereby realizing the main goal of the plugin
- let the emergency vehicle pass through as soon as possible.
|
|
鑑賞作品
|
|