Cloud Programming World Cup 第7回 学生クラウドプログラミングワールドカップ(主催:CPWC実行委員会)のエントリー総数は22チームとなり、20チームが予選を通過、7チームがノミネート。2019年11月14日、品川インターシティホールに於いて、最終公開審査を経てワールドカップ賞及び4つの審査員特別賞が決定いたしました。
 |
|
審査員特別賞
Best Optimization Award
佐藤 誠氏(東京工業大学 名誉教授) |
エントリーNo.
26 |
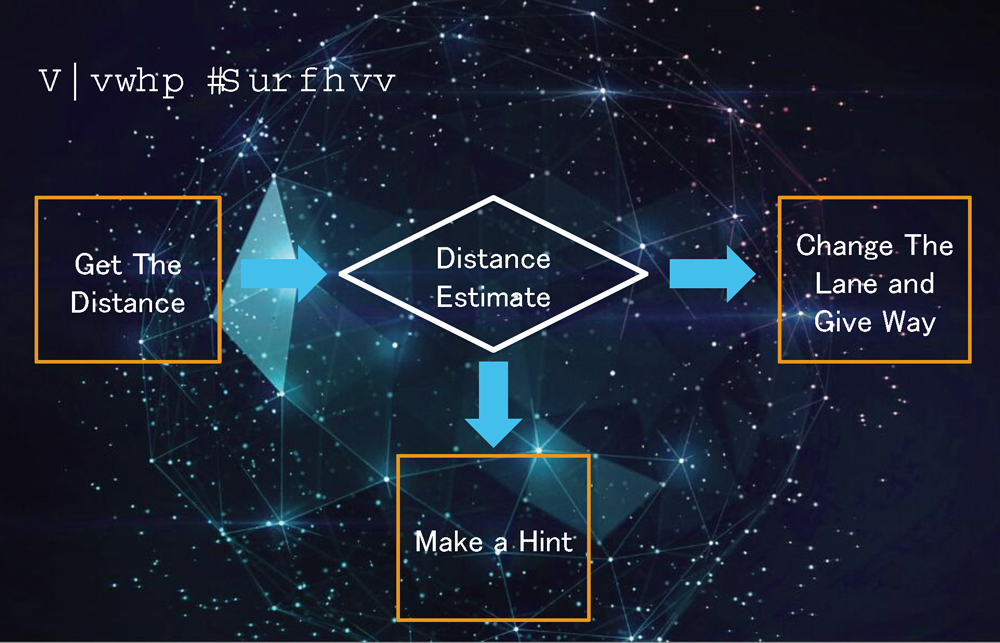
| 作品タイトル : Emergency Vehicle Plugin |
| チーム名 : Brochet 所属 : 北京建築大学(中国) |
|
|
 データ概要
データ概要
自動操縦のテクノロジーとモノのインターネット機能を使って、緊急車両の交通の効率を改善するための作品。EVPによって前方の民間車両に回避コマンドメッセージをリアルタイムで送信して、他車両のドライバーが道を譲ることが出来るようにしている。また、ドライバーが迅速に対応しなかった場合は、自動的に車線を変更するよう指示することも可能となっている。これにより、緊急車両をできるだけ早く走行させるというこのプラグインの主な目標を達成している。
In order to improve the traffic efficiency of emergency vehicles, with
the help of the technology of autopilot and Internet of Things function,
EVP can send avoidance command messages to other civilian cars front in
real time, and help other drivers make ways in time. Or even make other
vehicles automatically direct the lane-changing tasks if their drivers
fail to respond quickly. Thereby realizing the main goal of the plugin
- let the emergency vehicle pass through as soon as possible.
|
|
作品を鑑賞
|
|
|
審査員特別賞
Creative Solution Award
楢原 太郎 氏
(ニュージャージー工科大学建築デザイン学部 准教授) |
エントリーNo.
21 |
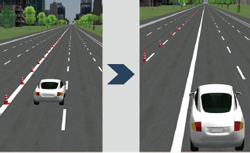
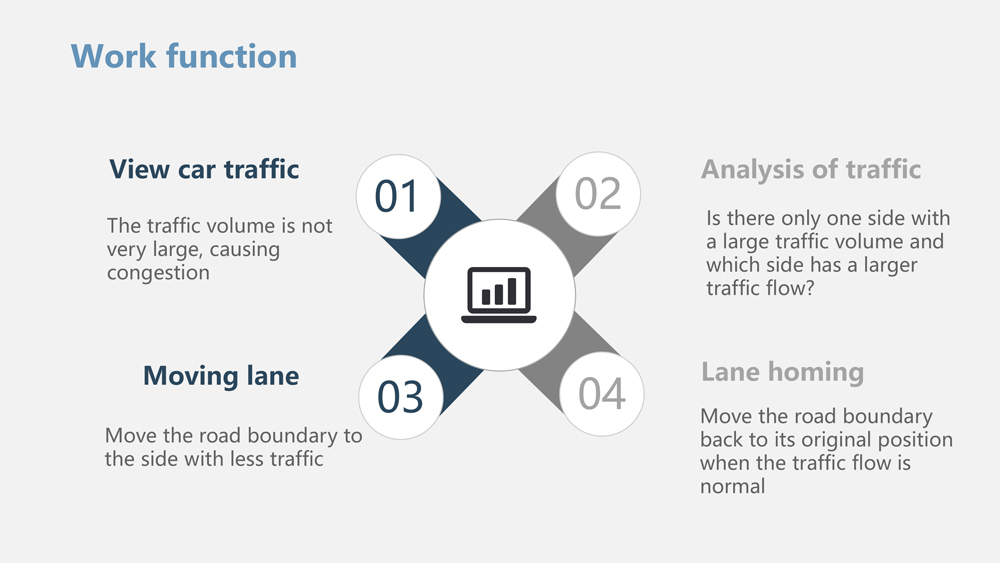
| 作品タイトル : Tidal Lane Simulation |
| チーム名 : NULL 所属 : 上海大学(中国) |
|
|
データ概要
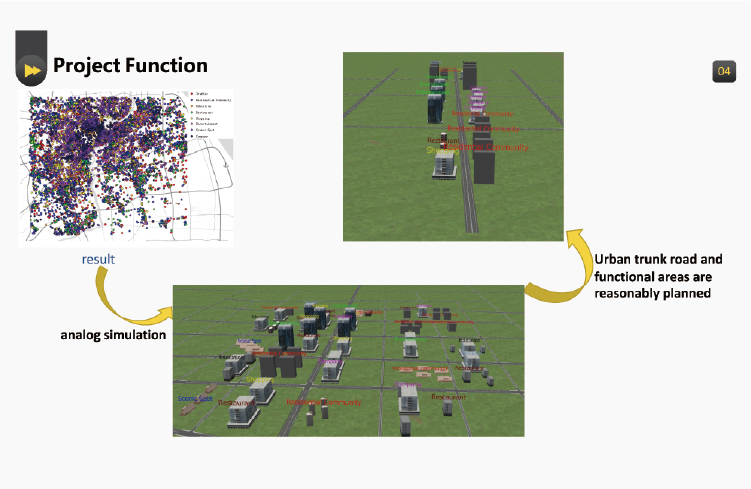
「潮現象」により、毎朝都市に入る車の流れは大きく、逆向きの流れは小さくなる。一方、夜間は都市を出る交通流が大きくなり、渋滞を悪化させる。本作品では、この状況を省みて、交通流を変えるために可変式の車線を運用している。つまり、午前中は都市に流入する方向の車線を増やし、夜のピーク時には都市部へ向かう車線を減らして都市部から出る車の車線を増やしている。
Because of the "tidal phenomenon" of traffic, the traffic flow
in the direction of entering the city is large and the reverse flow is
small every morning, while the traffic flow in the direction of leaving
the city is large at night, which aggravates the congestion phenomenon.
In view of this situation, traffic organization is carried out in the way
of variable lane in the transformation of traffic diversion, that is, increasing
the number of lanes in the direction of entering the city, reducing the
number of lanes in the direction of leaving the city, increasing the number
of lanes in the direction of leaving the city in the late peak, and reducing
the number of lanes in the direction of entering the city in the way of
increasing the number of lanes in the direction of leaving the city in
the late peak.
|
|
作品を鑑賞
|
|
|
審査員特別賞
Future transport design Award
ペンクレアシュ・ヨアン 氏
(フォーラムエイトVR開発テクニカル・マネージャ) |
エントリーNo.
39 |
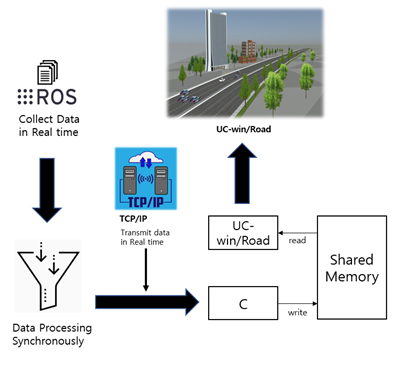
| 作品タイトル : Implementation of digital twin for vehicle and its surroundings |
| チーム名 : KaAI 所属 : 国民大学校(韓国) |
|
|
データ概要
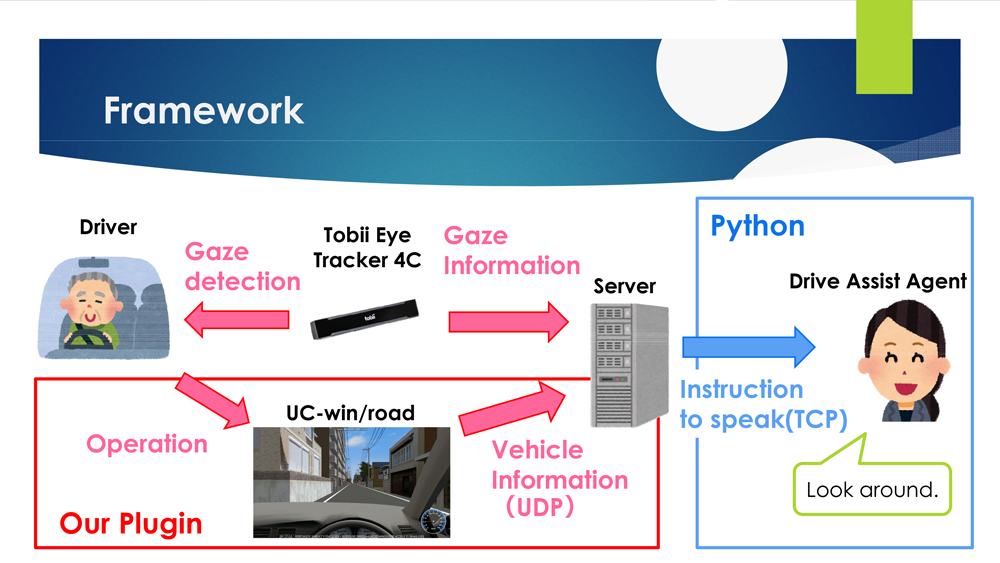
この世界のデジタルレプリカとしてデジタルツインを構築している。パノラマカメラとLidarセンサーを融合することで車両の周囲の情報を取得し、融合したセンサーからの同期画像を使用したYOLOをトレーニングデータとして使用して他の車や物を検出している。さらに、ドライバーの意図を目で把握することが可能となっており、その情報を備えたデジタルの世界では、CANバスネットワークから車両のステータスを取得し、現実の世界を見ることができる。
We constructed the digital twin which is a digital replica of a living
world.
We got information about the surroundings of the vehicle by fusing panoramic
camera and Lidar sensor.To detect other cars and things, we used YOLO with
synchronized Images from fused sensors as training data.Additionally, we
can apprehend driver's intention through his/her eyes.In the digital world
with that information, we get our vehicle's status from CAN bus network
and we can monitor the real world.
|
|
作品を鑑賞
|
|